





 Research Fields
Research Fields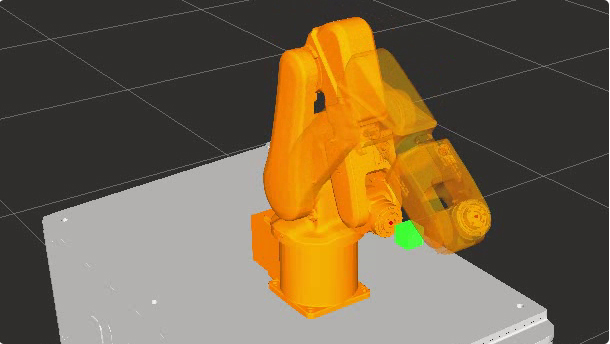
Mobile Manipulator
We are doing research on automatic operation of mobile manipulator in structured or unstructured environment, for the purpose of providing theoretical basis and practical experience in real applications.
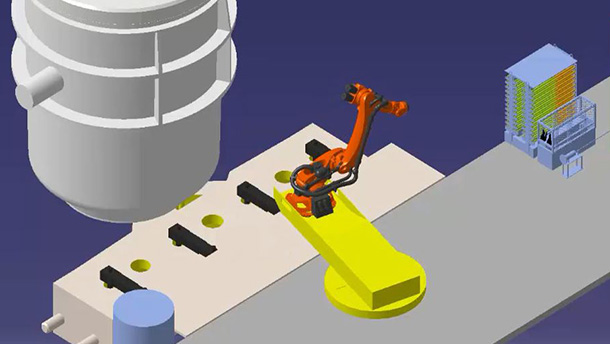
Smelting Industry Robot
Researches on techniques of robotics-visual-control, haptic-control and visual inspection which are applied in harsh working condition.

Medical Robotics
Research on medical robot design, control and tele-operation.

Logistics Robot
Research on localization, navigation and dispatch technology of AGV.
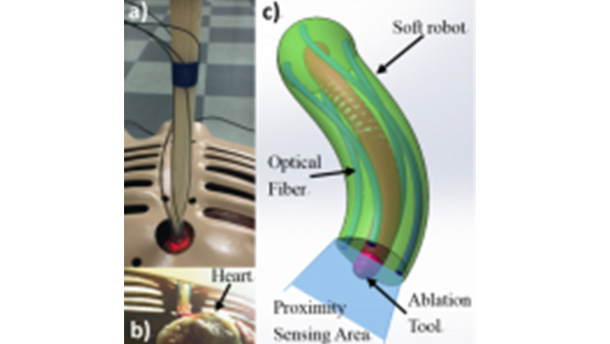
Soft Robotics
Inspired by the structure of "Muscular Hydrostat", we design a cable driven soft robot to realize the complex functions of the trunk. Cables are used to simulate the longitudinal muscles.

Power Station/Line Inspection Robot
Focus on the application of robot technology research on the design, control and operation in the field of mobile intelligent inspection robot.
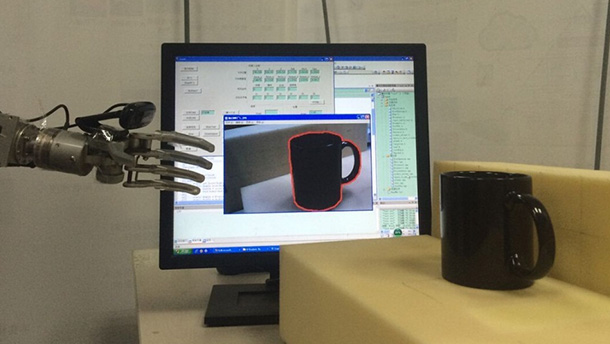
Visual Servoing
Our research include: Environment-robust uncalibrated visual servoing; Visual contour servoing aiming at object assembly and monitoring; Vision-based automatic manipulation of soft tissue aiming at robot surgery; Vision-based quadrotor control.

Mobile Robot
Research on planning, control and navigation technology of mobile service robot for applications of robotics technology in non-traditional manufacturing.
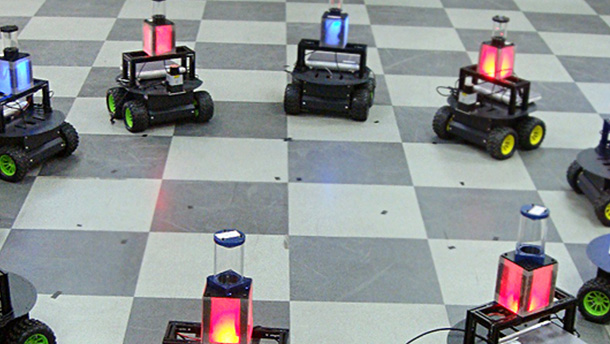
Multi-robot Systems
Main Research Contents:Coordinate formation control, area coverage and cooperative exploration and rescue under networked communication environments. Task planning, path optimization, and coordinate transportation of mobile robots in factory applications.

Intelligent Manipulator
Focus on flexible and intelligent service and industrial manipulator. Research the security design of service manipulator, perception (haptic and vision) based robot control technology, intelligent programming technology.
