





 研究方向
研究方向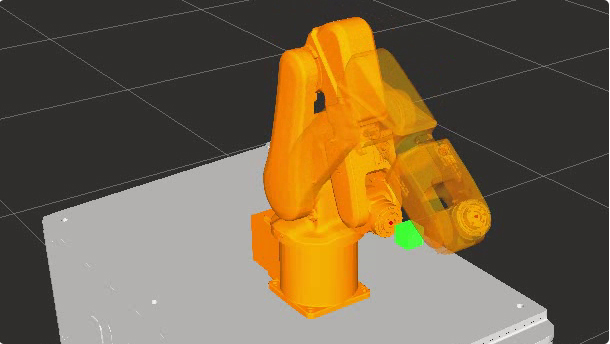
移动操作臂
针对在工业环境或非结构化环境中使用移动操作臂进行自主操作的研究,为将移动操作臂推向实际应用提供理论依据与实践经验。
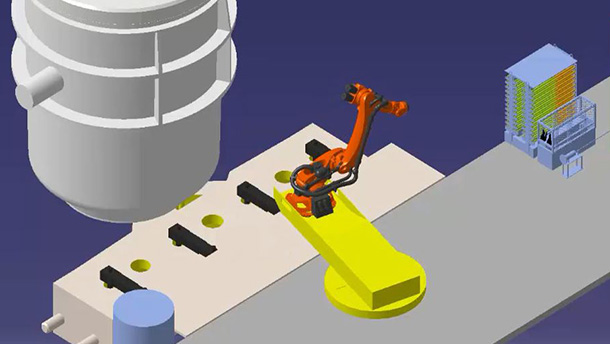
冶炼机器人
面向机器人技术在钢铁行业中的应用,研究在恶劣工况下高鲁棒性的工业机器人视觉控制、力觉控制和视觉检测及测量等技术。

医疗机器人
面向机器人在医疗领域的应用,研究软体手术机器人系统的设计、控制与遥操作技术。

物流机器人
主要研究内容包括:仓储环境下的AGV(Automated Guided Vehicle)的多种方式定位、导航以及多AGV的调度系统,从而实现物料的自动化运输与管理。
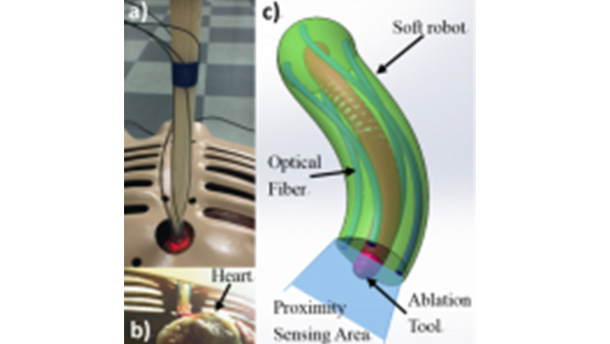
软体机器人
受到“肌肉性静水骨骼”结构的启发,本研究设计了一种线驱动软体机械臂,用驱动线来模拟“纵向肌肉”,以期望实现类似于象鼻的复杂功能。

电力巡检机器人
面向机器人技术在电力行业巡检作业中的应用,研究移动式巡检机器人的设计、控制和操作的理论与技术,实现其智能无人巡检。
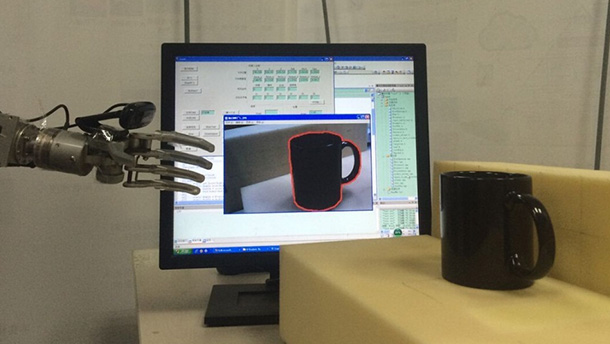
视觉伺服
主要研究内容包括:对环境有较强鲁棒性的未标定伺服;面向物体装配监测的视觉轮廓伺服;以及针对手术机器人开发前景,研究基于视觉的软组织自动操作;基于视觉的四旋翼直升机控制。

移动机器人
面向机器人技术在非传统制造业中的应用,研究移动机器人的规划、控制与导航技术。
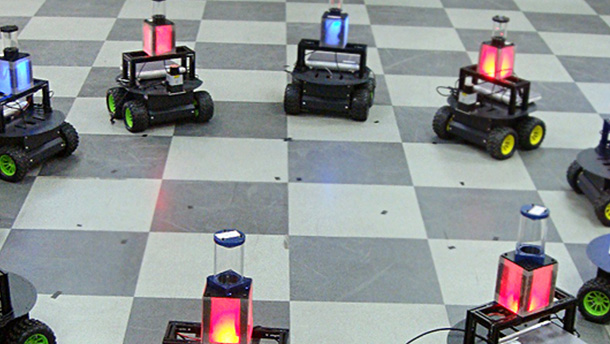
多机器人系统
针对非结构环境下多移动机器人系统的团队作业,研究多机器人系统的基础理论和关键技术,为设计和分析多移动机器人系统提供系统化的建模与控制理论和方法。

智能操作臂
针对服务和工业操作臂的柔性化和智能化需要,研究服务型操作臂的安全性设计、基于感知(力觉和视觉)的机器人控制技术、智能化编程技术等。
